Meet InO-Bot
Be sure to charge InO-Bot before its first use. The power and sound switches need to be set to OFF in order for InO-Bot to charge. The switches are located underneath the robot.
InO-Bot Features and Sensors
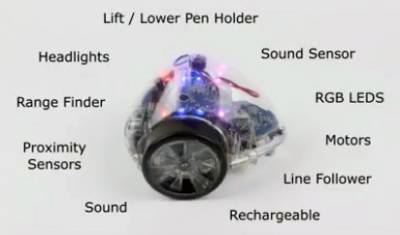
Features
Lift/Lower Pen Holder: Insert a marker into the Pen Holder and program it to be in the up or down position within a program. This feature is useful for drawing geometric shapes, patterns, and pictures.
Headlights: The InO-Bot has 2 front lights that can be programmed to turn On or Off, including these actions based on sensor inputs.
LED Lights: InO-Bot has 8 LED lights, all of which can be programmed individually or together. LED lights can be programmed to display a specific color and for a specified duration of time.
Motors: The Motors operate the wheels on the right and left sides. Motors can be programmed to run together or separately. The motors can also be programmed to react based on sensor inputs.
Sensors
Light Sensor: The Light Sensor is located in front of the Pen Holder and measures the amount of ambient light. You can write programs that have InO-Bot react based on an input of a designated light threshold. The Light Sensor value range is 0–1.0, with 1.0 being the brightest.
Sound Sensor: The Sound Sensor is located behind the Pen Holder and measures the level of sound. You can write programs that have InO-Bot react based on an input of a specified sound level. The Sound Sensor value range is 0–255.
Distance Sensor: The Distance Sensor measures how far ahead an object is, up to 255 centimeters.
Proximity Sensors: There are 4 Proximity Sensors: FrontRight, FrontLeft, RearRight, and RearLeft. The Proximity Sensors report a true or false state.