Programming Tuff-Bot
To program Tuff-Bot directly, use the buttons on the keypad.
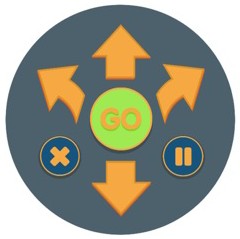
The forward and back arrow buttons move Tuff-Bot approximately 20 cm or about 8 inches.
The right and left arrow buttons rotate Tuff-Bot 45 degrees. Pressing these buttons don’t move Tuff-Bot; they just turn it to point in the new direction.
The X button clears Tuff-Bot’s memory, erasing any entered commands.
Tuff-Bot can store 200 commands, which include forward/backward movement commands, turn commands, and pause.
When you press Go, Tuff-Bot will run all the commands in the sequence, with a short pause between each command. Read more about the pauses in the Speed button section below.
When Tuff-Bot has finished all the commands that have been entered, it will play a sound. You can turn the sound off using the Sound switch.
To stop Tuff-Bot while it is moving, press the Go button.
Pressing the Pause button, with the two vertical lines, causes Tuff-Bot to stop for .5 seconds before continuing its program.
The Speed button has settings for three different modes.
- Mode 1: Button is not lit. When first turned on, this setting is active. Tuff-Bot will pause between each step in its program.
- Mode 2: Button shines green. Tuff-Bot will not pause between commands when traveling in a straight line.
- Mode 3: Button flashes green. Tuff-Bot will not pause between commands when traveling in a straight line. Also, turns will be faster for better performance on an uneven surface.
The Light Sensor automatically causes the headlights to turn on when Tuff-Bot enters a dark environment.
Press the Avoidance button to turn on this feature; the button shines green when on. Tuff-Bot will then back up when it detects an obstacle in its path and try an alternate route. During this obstacle avoidance, the front 3 lights will turn red and Tuff-Bot will play a sound. To turn avoidance mode off, press the button again and the button’s green light will turn off.
If Tuff-Bot is not avoiding obstacles, make sure avoidance is activated and its light is green. The obstacle must be high enough to be trigger the sensor. Small objects may not be seen.